Rotational-kinematical hypothesis and testing of an orbital velocity and distance
This difference is perfectly explained for any kind of cycloids by the rolling
itself. How ? ... by imagining a circle as a polygone consisting of infinite
vertices. The sum of these infinite small side lengths equals 2 * pi * r, while
rolling creates an additional trajectory caused by rotating on the polygones vertices
before the next following polygonal side length touches the roll-path.
Hypothesis
The next and final question , which consequentially rises after studying
the rolling process and which shall be the roational-kinematical hypothesis to
be tested, is following:
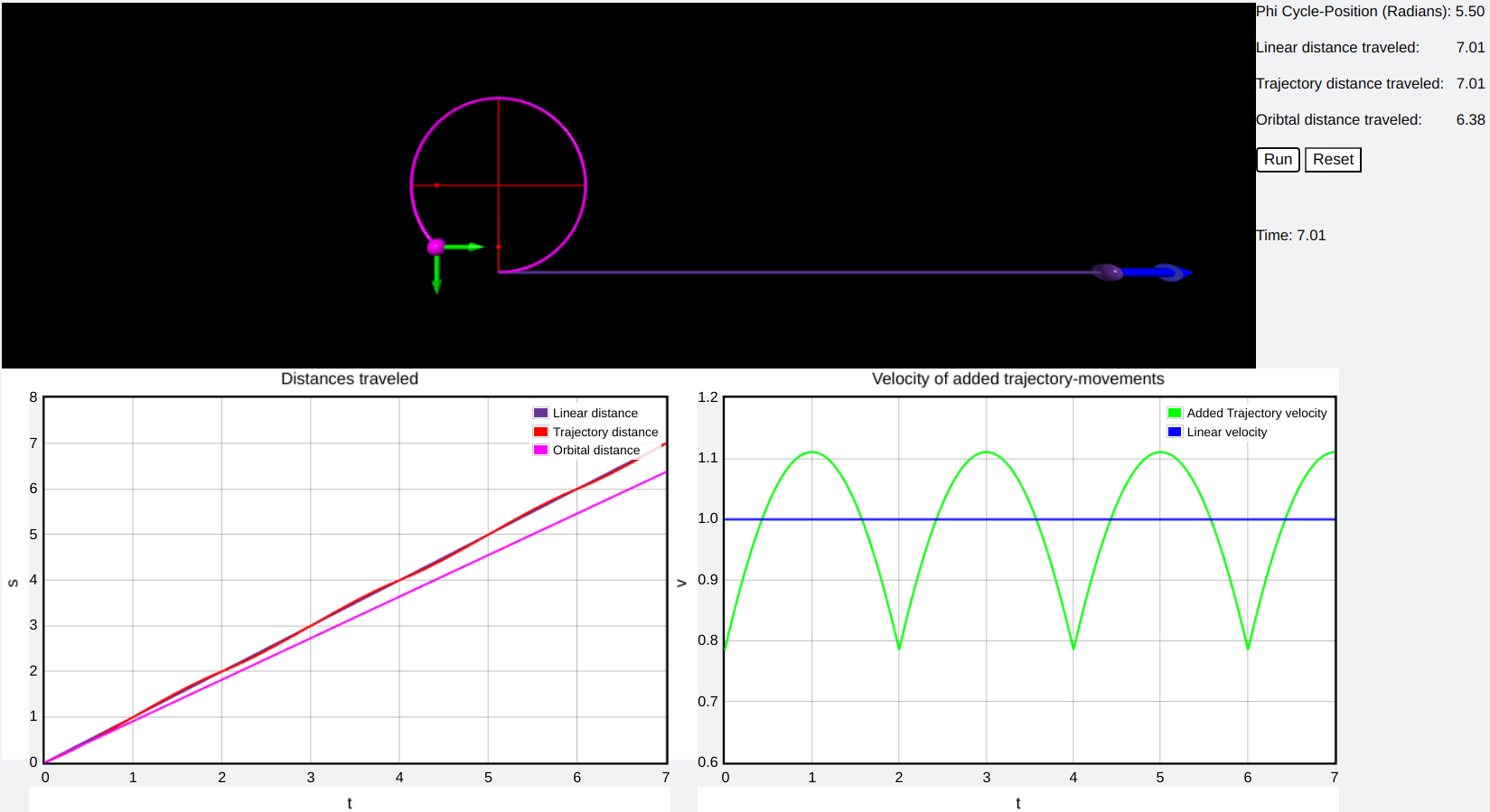
Does a stationary circle (rolling in-place) or an object moving along a circular path also create a trajectory of 8r?
If the answer is Yes, than the drawn (= traveled) circumference of any circular
path would equal 8r, while a circumference of 2 * pi * r would only be valid for
an already given (= statical) circle with no object on it undergoing circular kinematics
Preparation of the hypothesis (by analyzing the hypocycloid)
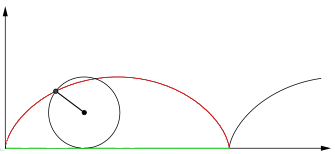
What counts for rolling on an even path (red cycloid on top) is also valid for the rolling-process on a curve (e.g hypocycloid below), by which the traveled distance of 2*8r (=8R) is generated as well (observing the point on the red line) as in following animation:
 $$
\begin{aligned}
\small \text{Start position } (\theta = 0): \enspace \text{Red point on the most right position}
\newline
\small f(\theta): \enspace \text{Traveled red trajectory}
\newline
\small \theta: \enspace \text{Traveled angle of the length between the two center of both circles}
\end{aligned}
$$
$$
\begin{aligned}
\small \text{Start position } (\theta = 0): \enspace \text{Red point on the most right position}
\newline
\small f(\theta): \enspace \text{Traveled red trajectory}
\newline
\small \theta: \enspace \text{Traveled angle of the length between the two center of both circles}
\end{aligned}
$$
Setting-up the hypocycloidal equation to solve
Now we have set-up the full equation we will stop before its analytical solving and directly jump to a method of numerically solving the equation for one rotation of the hypocycloid (one cycle of drawing the red trajectory).
Numerical solving of the hypocycloidal equation (Monte-Carlo-Simulation)
To be continued ...
Results of object-movement on a circular path via VPython